
Developed from the first YF-16 prototype, the YF-16 CCV (Control-Configured Vehicle) involved adding a pair of movable ventral fins under the intake, as well as reworking the flight control systems to allow the control surfaces to work independently of each other. This concept, known as “decoupling”, was anticipated to allow the YF-16 to maneuver in two planes at once, giving it a tactical edge. The CCV first flew on 16 March 1976, with the program running through 30 June 1977, with a hard landing being the only accident in the program.


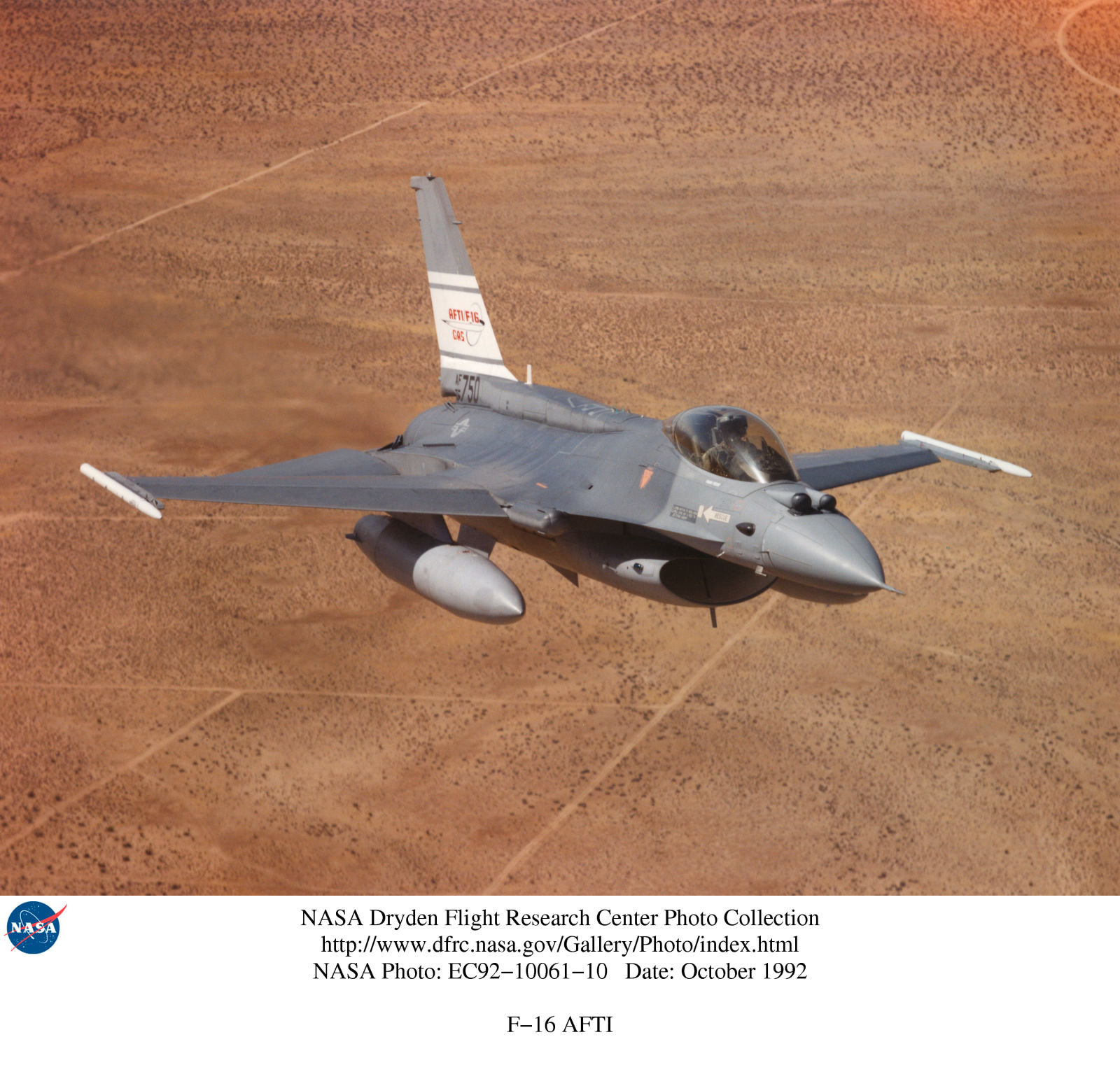
The CCV led directly to the F-16 AFTI (Advanced Fighter Technology Integration), converted from the 6th full-scale development F-16. The same ventral fins from the CCV were added, as well as a spinal box fitting for electronics. The avionics were upgraded with a full-authority triplex Digital Flight Control System (DFCS) and an Automated Maneuvering Attack System (AMAS), providing six independent degrees of freedom. The systems were designed to be fault tolerant, so that no single failure should affect correct operation. In the event of a second fault developing, the system was able to fall back to a “safe mode” to allow the pilot to maintain control. To guard against unforeseen failure modes which might bring the entire DFCS down, the system incorporates a simple analog backup flight-control system. Other technologies investigated included:
- Voice-Controlled Interactive Device, made by Lear-Siegler, which contained a dictionary of 32 to 256 words which could be used to control the AFTI’s avionics suite. In the early stages of VCID testing only simple, one-word commands were used, such as ‘menu’, ‘data’, the points of the compass, numbers, and the phonetic alphabet. Only non-critical functions such as navigation are controlled by the VCID. In a later stage tests were conducted to investigate the feasibility of complex multi-word command recognition. The system was limited in that it could only recognize one voice, few pilots were able to keep talking during maneuvers exceeding 5 G’s, and the ambient noise in the cockpit reaching 120dB. Still, the system responded accurately to a staggering 90% of the commands spoken.
- Helmet-Mounted Target Designation Sight, which allowed the pilot to designate a target simply by aligning a cross hair on the visor with it and pressing the “designate” button on the HOTAS. Also, the FLIR and radar were slaved to the helmet, similar to the systems in the AH-64 Apache. Finally, the system could indicate a target’s position to the pilot with a series of LEDs in the helmet, lighting them to tell the pilot which way to turn his head. The relative position of the pilot’s head in the cockpit was determined by using a magnetic field, generated by a transmitter mounted on the canopy directly behind the pilot’s head, and a receiver weighing 0.113kg on the helmet.
The F-16 AFTI first flew on 10 July 1982 at Carswell AFB, Texas, with the program moved to Edwards AFB following GD manufacturing trials. Phase One testing, which evaluated the DFCS and demonstrating the plane’s direct translational maneuvering capability, ran until 30 July 1983. Phase Two commenced in 1984, with the full AMAS being installed, as well as FLIR pods at the wing leading edges.

During Phase II testing, which lasted until 1987, the AMAS enabled the AFTI/F-16 to translate in all three axes at a constant angle of attack and to be pointed up to six degrees off the flight vector. The digital flight control system gave the pilot a new freedom in maneuvering, making it possible to assume unorthodox flight attitudes, using nose pointing, direct force translation, and other unconventional means of maneuvering. The aircraft was also used to test and evaluate a variety of single-place cockpit layouts and systems. Pilots evaluated heads-up and head-down displays, voice interaction command systems, synthesized speech voice warnings, and touch-sensitive display screens. This aircraft also tried out products from the Air Force Microcomputer Applications of Graphics and Interactive Communications (MAGIC) project, which studies pictorial formats for situation displays in all three axes.

During the following years, the AFTI/F-16 became associated with Close Air Support (CAS) studies, some of them conducted by NASA. These studies were in support of the proposed A-16 or other future close air support/battlefield air interdiction aircraft. The AFTI/F-16 was upgraded with an F-16C block 25 wing and with block 40 F-16C features such as APG-68 radar and a LANTIRN interface. The ventral maneuvering fins were removed. It went through a five-phase CAS evaluation program over 1988-1991, testing such low-level battlefield interdiction techniques as automatic target handoff-systems (in which target data was transferred from ground stations or from other aircraft to the AFTI/F-16), the Pave Penny laser-designator pod, off-axis weapons launch techniques, and various digital systems.

In the middle 1990s, the AFTI was involved in a joint program investigating Automatic Ground Collision Avoidance System (Auto-GCAS), which relied on a digital terrain data base and accurate navigation inputs to prevent controlled flight into terrain (CFIT), a leading cause of crashes. The system went a step beyond warning the pilot; it actually executed an aggressive fly-up recovery through the F-16 autopilot. The correlation between aircraft position and the digital terrain data base depended on radar altimeter time history, although Global Positioning Systems or inertial navigation inputs could also be used. A GCAS algorithm combines digital terrain system data with the aircraft’s current flight parameters, then predicts a recovery profile and executes an escape maneuver through the autopilot. The escape maneuver was a roll-to-wings-level and 5g fly up. For AFTI testing, the GCAS only activated when minimum terrain clearance is projected to be 50-150 ft. However, the minimum terrain clearance can be any distance desired. It was arbitrarily chosen to be a minimum of 150ft normally and 50ft for strafe as a reasonable buffer. In 1995 the AFTI F-16 conducted more than 1,000 auto recovery tests, and by November 1996 the AFTI F-16 tests established Auto-GCAS warning criteria by defining appropriate activation altitudes. In January 1997, a two-year program aimed at “migrating the AFTI software into production hardware” had begun. Follow-on Auto-GCAS testing have been done on a production Block 25 F-16D in 1998.

One of the AFTI’s last programs was the development of an all-electric “power-by-wire” flight control system, which eliminated hydraulic or mechanical systems from the aircraft’s control surfaces. This project was part of the JSF, which resulted in the F-35 Lightning II, which is set to replace the F-16 for the 21st century.


In 1988, the USAF’s Tactical Air Command loaned a Block 30 F-16D to General Dynamics for conversion to the VISTA (Variable stability In-flight Simulator Test Aircraft). The VISTA F-16D was redesignated NF-16D, the N prefix meaning that the aircraft had a special test status and that the modifications were sufficiently drastic that it would be impractical to restore the plane to its original condition.
The NF-16D has two variable feel sticks, the original sidestick is over on the console, while the center stick is mounted on a short pedestal between the pilot’s knees. The upfront controller had to be removed to put the center stick in, but since the VISTA is a research plane and not a fighter, the loss was acceptable. Both sticks can be either force or motion sticks, with complete control of force gradients, shaping and range of motion.
Three ROLM Hawk/32 computers, mounted in the aircraft’s spinal box, provide the variable stability functions and make VISTA an in-flight simulator. The computer system monitors the pilot’s inputs and then moves the aircraft’s control surfaces to produce the required motions. The controls to access the computer to change flight characteristics and engage the front seat controls are mounted in the back seat. The Variable Stability System (VSS) commands symmetric and asymmetric horizontal tail movement, symmetric and asymmetric flaperon movement, rudder and throttle control. The only surfaces not controlled by the VSS are the leading edge flaps and speedbrakes. Other modifications included in the VISTA configuration include heavy weight landing gear and a larger capacity hydraulic pump and lines to accommodate the increased surface motions needed to simulate other aircraft. The NF-16D was transferred to Wright Labs and flown five times between 1988 and 1992, but the plane was placed in storage after funding was exhausted.
The F-16 Multi-Axis Thrust-Vectoring (MATV) program originally began as a joint General Electric/General Dynamics privately-funded program for a thrust-vectored version of the Fighting Falcon. The USAF initially declined to support the program, so the two companies agreed to collaborate with the Israel Defense Force/Air Force, which was highly interested in the program for its own F-16s. Under the terms of the agreement, the IDF/AF was to supply a F-16D for the tests, with the two American companies doing the conversion. However, in 1991 the USAF’s Wright Laboratory became interested in the project, and the USAF now assumed an active role. Israel withdrew from the program in 1992. The NF-16D was returned to Fort Worth in 1993 for modification, including the removal of the variable stability computers and center stick, and the addition of a thrust vectoring nozzle. General Dynamics completed six test flights at their Fort Worth facility, then the plane was ferried to Edwards AFB for the MATV test program, which began in March 1994. The program objectives itself included the demonstration of the tactical utility of thrust vectoring in close-in air combat and in the use of integrated control of thrust vectoring in flight. The aircraft has demonstrated a steady angle of attack of as much as 86° and a transient angle of attack of up to 180°. In other words, the aircraft can fly backwards for a brief time. The MATV and VISTA tests proved that thrust vectoring provides a significant advantage in terms of bringing armament to bear on a threat more quickly, as well as helping to mitigate the risk of departure from controlled flight during violent maneuvers. Conversely, the program also demonstrated that the use of really high AoA maneuvers should only be a last-ditch operation in aerial combat, as an aircraft in a low-energy state is vulnerable.
The NF-16D has been transferred to the USAF Test Pilot School, where it continues to be used to explore flight control systems.

